개요
자율주행 차량의 센서(LiDAR, Camera, IMU, ...)와 관련된 소프트웨어가 ROS 기반으로 작성되거나 제공되는 경우가 많습니다.
ROS(Robot Operating System)는 로봇 응용 프로그램을 개발할 때 필요한 하드웨어 추상화, 하위 디바이스 제어, 일반적으로 사용되는 기능의 구현, 프로세스간의 메시지 패싱, 패키지 관리, 개발환경에 필요한 라이브러리와 다양한 개발 및 디버깅 도구를 제공합니다.
ROS도 다른 소프트웨어처럼 여러 버전이 존재합니다. 여기서 설치할 ROS Neotic Ninjemys는 2020년 5월 23일 릴리즈되었으며 ROS 1의 13번째이자 마지막 버전입니다. 2017년 12월 8일에 OpenRobotics에 의해 공개된 ROS2는 기존 ROS와 호환되지 않는 완전히 새로운 ROS 시스템으로 보셔야 합니다.
| Features | ROS 1 | ROS 2 |
| Platforms | Linux, macOS | Linux, macOS, Windows |
| Real-time | external frameworks like OROCOS | real-time nodes when using a proper RTOS with carefully written user code |
| Security | SROS | SROS 2, DDS-Security, Robotic System Threat Model |
| Communication | XMLRPC + TCPROS | DDS (RTPS) |
| Middleware interface | - | rmw |
| Node manager(discovery) | ROS Master | No, use DDS's dynamic discovery |
| Languages | C++03, Python 2.7 | C++14(C++17), Python 3.5+ |
| Client library | roscpp, rospy, rosjava, rosnodejs, and more | rclcpp, rclpy, rcljava, rcljs, and more |
| Build system | rosbuild - catkin (CMake) | ament(CMake), Python setuptools |
| Build tools | catkin_make, catkin_tools | colcon |
| Build options | - | Multiple workspace, No non-isolated build, No devel space |
| Version control system | rosws -> wstool, rosinstall (*.rosinstall) | vcstool (*.repos) |
| Life cycle | - | node life cycle |
| Multiple nodes | one node in a process | multiple nodes in a process |
| Threading model | single-threaded execution or multiple-threaded execution | custom executors |
| Messages | *.msg, *.srv, *.action | *.msg, *.srv, *.action, *.idl |
| Command Line Interface | rosrun, roslaunch, ros topic ... | ros2 run, ros2 launch, ros2 topic ... |
| roslaunch | XML | Python, XML, YAML |
| Graph API | remapping at startup time only | remapping at runtime |
| Embedded Systems | rosserial, mROS | microROS, XEL Network, ros2arduino, Renesas, DDS-XRCE, AWS ARCLM |
설치
그럼, ROS Noetic Ninjemys 를 설치해 보도록 하겠습니다.
https://wiki.ros.org/noetic/Installation
| Distro | Release date | EOL date |
| ROS Noetic Ninjemys | May, 2020 | May, 2025 (Focal EOL) |
| ROS Melodic Morenia | May, 2018 | May, 2023 (Bionic EOL) |
| ROS Lunar Loggerhead | May, 2017 | May, 2019 |
| ROS Kinetic Kame | May, 2016 | April, 2021 (Xenial EOL) |
| ROS Jade Turtle | May, 2015 | May, 2017 |
| ... | ... | ... |
※ ROS Noetic은 공식적으로 최신 배포버전인 우분투 22.04를 지원하지 않습니다. (ROS Q&A 답변내용 참고하세요)
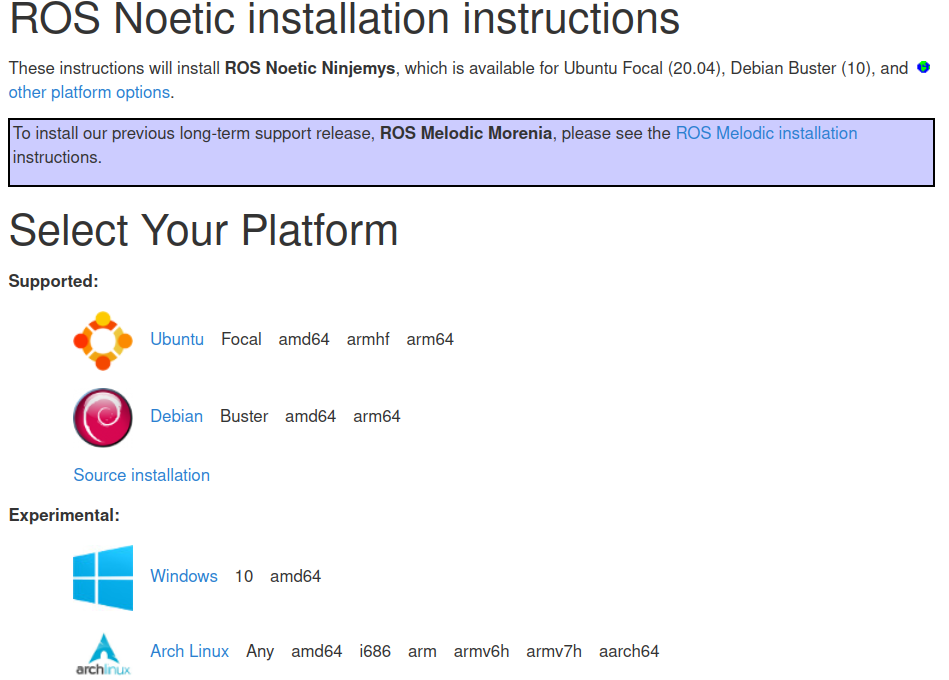
우분투는 현재(2022.08.08) 20.04(Focal)만 지원합니다. 따라서, 22.04(해파리)에서는 확인이 필요할 것 같네요.
설치 페이지(https://wiki.ros.org/noetic/Installation/Ubuntu)를 따라 하시면 됩니다.
요약하자면,
1. 설치 패키지 목록에 ros 를 추가합니다.
$ sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
2. ros 설치 키를 설정합니다.
$ sudo apt install curl
$ curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -
3. 패키지 목록을 업데이트 합니다.
$ sudo apt update
4. 데스크탑 풀버전을 설치합니다.
$ sudo apt install ros-noetic-desktop-full
5. Shell에서 실행할 수 있도록 환경설정을 합니다.
[bash]
$ echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
$ source ~/.bashrc[zsh]
$ echo "source /opt/ros/noetic/setup.zsh" >> ~/.zshrc
$ source ~/.zshrc
6. ros를 실행합니다.
$ roscore
참고사이트
- ROS Noetic 우분투 20.04에 설치해보기
- Ubuntu install of ROS Noetic
- [ROS Tutorial] 3. ROS Indigo 개발 환경 구축 (세미나 영상)
'Linux > Ubuntu Install' 카테고리의 다른 글
| Ubuntu 20.04를 22.04로 업그레이드하기 (0) | 2022.09.28 |
|---|---|
| Ubuntu Server에 GUI 설치하기 (0) | 2022.08.11 |
| Ubuntu 루트(root) 비밀번호(password) 설정하기 (1) | 2022.08.09 |
| Ubuntu 방화벽(UFW) 설정하기 (0) | 2022.07.14 |
| 윈도우 원격 데스크톱으로 우분투에 접속하기 (0) | 2022.04.22 |



