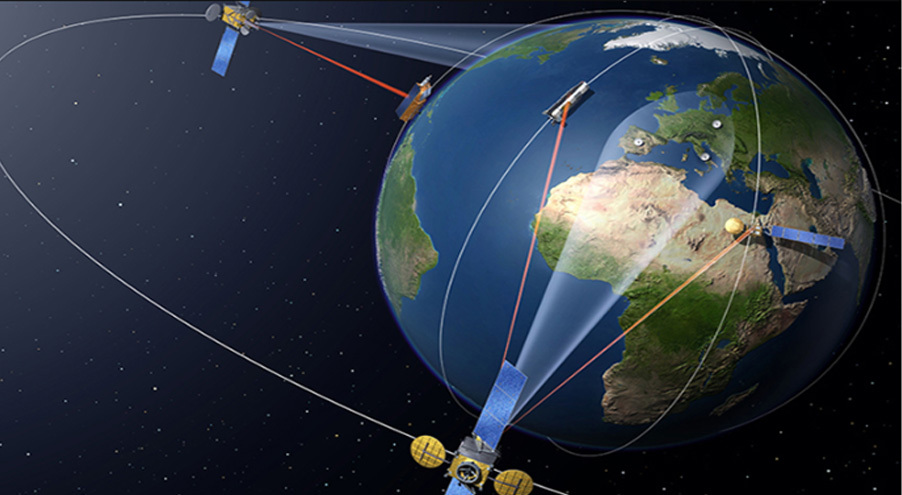
GNSS 측위 개요
GNSS(Global Navigation Satellite System : 위성항법시스템)는 범지구적인 측위정보 서비스 시스템으로 위성에서 발신한 전파를 이용하여 언제, 어디서, 누구에게나 정밀한 측위정보를 제공합니다. 이러한 GNSS의 기본적인 측위 개념은 궤도 상에 수십개의 위성군을 일정한 형상으로 배치하여 항상 전 지구를 커버할 수 있도록 하여 지구상의 사용자에게 언제 어디서나 위치, 항법, 시각정보를 제공할 수 있도록 하는데, 이를 위해서는 배치된 위성을 일정한 형상으로 유지하고, 통신 링크를 통해 위성의 정확한 궤도 정보를 실시간으로 탑재된 원자시계로 동기시켜 송출합니다. 위성의 궤도정보와 수신된 신호의 도달 시각차를 측정하여 삼각측량방법으로 사용자의 3차원 위치를 실시간으로 결정할 수 있도록 합니다.
GNSS 현황
현존하는 글로벌 위성항법 시스템(GNSS)으로는 미국방부가 개발하여 운영하는 GPS(Global Positioning System), 러시아의 GLONASS (GLObal NAvigation Satellite System), 유럽연합(EU)의 Galileo, 중국의 BeiDou가 있습니다. 그 외에도 일본의 QZSS(Quasi-Zenith Satellite System) 인도의 NAVIC(Navigation Indian Constellation) 등이 대표적인 GNSS 시스템입니다.
| 구분 | GPS | GLONASS | Galileo | Beidou | QZSS | NAVIC | |
| 최초발사 | 1978 | 1982 | 2011 | 2007 | 2010 | 2013 | |
| FOC(Fully Operational) | 1995 | 2011 | 2020 | 2020 | (2024) | (2022) | |
| 위성수 | 31 | 27 | 28 | 42 | 4 | 8 | |
| 현재상태 | 운영중 | 31 | 23 | 22 | 34 | 4 | 7 |
| 유지보수 | 2 | ||||||
| 예비 | |||||||
| Test Phase | 1 | 2 | |||||
| 기타 | 2 | 8 | 1 | ||||
* 2019년 10월 기준
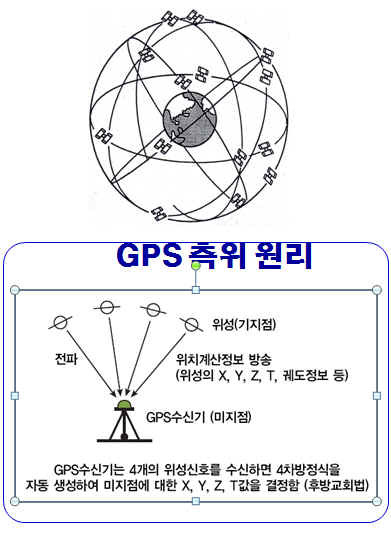
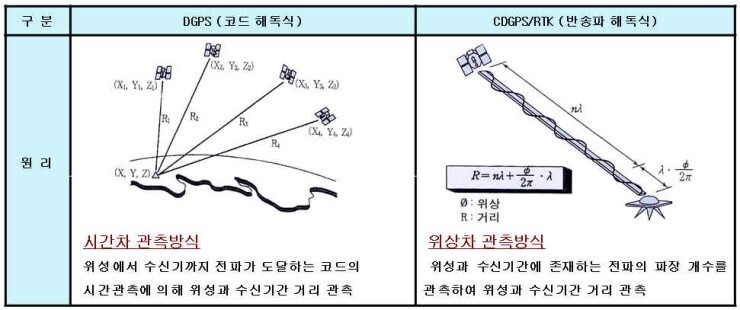
GPS의 측위 원리
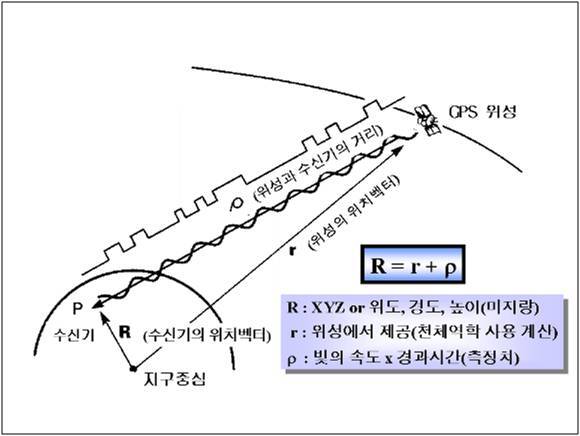
GPS 측위 원리는 삼각측량의 원리를 사용하는데 토목 및 지적 측량에서 사용되는 측량방법은 알려지지 않은 지점의 위치가 그 점을 제외한 두 각의 크기와 변의 길이를 측정하여 위치를 결정하는 반면 GPS 측위는 두 변의 길이를 측정함으로 미지의 점의 위치를 결정한다는 것이 삼각측량과의 차이점이라 할 수 있겠다. 즉 전형적인 측량방법은 두변의 각과 길이로, GPS 측량은 두변의 길이로서 측위를 할 수 있습니다.
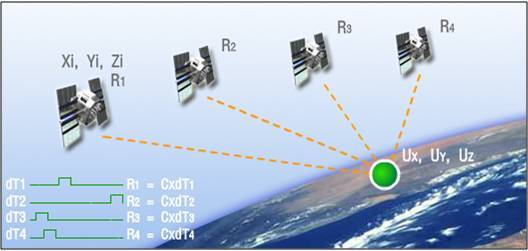
측위를 위해서는 위 측량방법을 기초로 삼각법을 이용한 GPS 위성위치와 GPS 수신기간의 거리를 알아야 한다. 아래 그림과 같이 위성에서 L1(1575.42MHz)주파수에 C/A(Coarse/Acquisition) 코드를 반송파(Carrier wave) 실어 송신하고, 수신기에서도 위성의 신호와 똑같은 코드를 발생하여 수신된 위성코드와 비교 후 위성의 신호가 수신기에 도착되는 소요 시간을 측정합니다. 위성신호의 속도(빛 속도)로 위성과 수신기간의 의사거리 (Pseudo Range)를 측정하게 되면 i번의 위성과 수신기와의 거리가 계산되며, 4개의 위성을 관측하여 거리를 계산하면 수신기의 위치를 측정할 수 있습니다.

인공위성으로부터 수신기까지의 거리는 각 위성에서 발생시키는 부호 신호의 발생 시점과 수신 시점의 시간 차이를 측정한 다음 여기에 빛의 속도를 곱하여 계산합니다.
< 거리 = 빛의속도 * 경과시간 >
실제로 위성의 위치를 기준으로 수신기의 위치를 결정하기 위해서는 이 거리 자료 이외에도 위성의 정확한 위치를 알아야 하는데 이 위성의 위치를 계산하는데는 GPS 위성으로부터 전송되는 궤도력을 사용합니다.

GPS의 측위기법과 정밀도
| 기법 | 내용 | 정밀도 |
| 단독 측위 | GPS 수신기 1대로 위치 측량 | 30m |
| DGPS | 측량용과 항법용 수신기를 결합하여 이동체의 후처리 및 실시각 정밀 위치 측량 | 1m ~ 5m |
| 후처리 상대 측위 (예: 데스크탑PC) | 2대 이상의 측량용 GPS 수신기를 이용하여 고정밀 상대 위치 측정하나 실시간 측량 불가능 | 수 mm |
| 실시각 이동 측위 (예: 노트북) | 2대 이상의 측량용 수신기를 이용하여 실시간 고정밀 위치 측정 | 1cm ~ 2cm |
● DGPS (위성항법보정시스템)
C/A 코드 하나만 사용할 경우 10-30 meter 이상의 정밀도로 위치를 결정하는 것은 현실적으로 불가능한데 이것은 수신기가 결정하는 위성까지의 거리 자료에 여러가지 오차 요인이 복합적으로 영향을 미치기 때문입니다.
이러한 오차를 줄이기 위한 방법으로 DGPS는 전국에 분포된 기준국(보정치 송신국)에서 위성신호 오차성분을 관측하여 보정정보를 생성하고 사용자에게 방송하는 과정을 통해 1미터 이내의 정확한 위치 정보를 제공해 주는 시스템입니다.
DGPS는 두 개의 GPS 수신기를 필요로 합니다. 제 2의 장치가 수신기 근처에 존재하여 지금 현재 수신받는 자료가 얼마만큼 빗나간 양이라는 것을 수신기에게 알려줄 수 만 있다면 위치결정의 오차를 극소화시킬 수 있는데 바로 이 방법이 Differential GPS 또는 DGPS라고 불리는 기술입니다.
날씨에 관계없이 위치, 속도, 시간 측정에 활용할 수 있으며 항만 입출항 및 협수로 통항 선박의 안전 항해를 위한 항법시스템 등 다양한 분야에서 이용되고 있습니다.
● CDGPS (RTK-DGPS)
고정밀 실시간이동측량 기법인 RTK (Real Time Kinematic)의 기본개념은 정밀한 위치를 확보한 기준점의 반송파 오차 보정치를 이용하여 사용자가 실시간으로 수 cm의 정밀도를 유지하는 관측치를 얻을 수 있게 하는 것입니다. RTK의 기본개념은 오차보정을 위해 기준국에서 전송되는 데이터가 반송파 수신자료라는 것을 제외하고는 DGPS의 개념과 거의 유사합니다. 다만 RTK가 각 위성에 대한 반송파 측정치를 지속적으로 제공하여야 하고, 정보의 전송장애로 발생할 수 있는 오차의 한계가 DGPS보다 상대적으로 크기 때문에 보다 안정적이고도 신속한 정보전달 통신 시스템이 요구됩니다. 현재 GPS를 응용하는 여러 분야에서 DGPS와 RTK가 주로 사용되고 있으며, GIS나 측량, 항법등 모든 응용분야가 RTK 기법의 사용에 초점을 맞추어 실용화되고 있습니다.

RTP-DGPS가 오차를 감지하고 보정하는 절차를 간단히 살펴보겠습니다.
1) 미리 알고 있는 위치(위도/경도/경도)에 GPS를 설치합니다. (위 그림에서 기준점, 즉 GPS Base가 됩니다)
2) 기준점에서는 현재의 정확한 위치를 알고 있기 때문에 수신된 GPS의 오차를 알 수 있습니다.
3) 기준점에는 RF 송신 장치가 있어서 주변에 RF 수신이 가능한 GPS 장치에 계산된 GPS 오차를 전송해 줍니다.
4) 주변 GPS(위 그림에서 측정지점, GPS Rover)에서는 수신한 GPS 오차로 현재 GPS 데이터의 오차를 보정합니다.
당연하겠지만 기준점과 측정지점간의 거리가 멀어질수록 오차 보정값의 정확도가 떨어집니다.
DGPS 기술 현황
상대 측위 (DGPS)
GPS수신기 1대만 사용하여 측위시에는 오차가 크게 발생 되므로 측위 정확도를 높이기 위해서는 2대의 수신기를 동시에 사용하여 양측에서 동일하게 발생되는 오차를 상대적으로 소거하는 상대측위(DGPS : Differential GPS)를 실시하여 정확도를 높일 수 있습니다.

DGPS와 CDGPS(RTK)의 차이점
RTK 방식 CDGPS 및 VRS (가상기준점서비스)
국내에서도 국토지리정보원 등에서 지적측량 및 수치지도(디지털지도) 제작 등을 위하여 반송파추적식 GPS장치로 후처리 및 실시간 측량에 운용되며, 전국 단위의 VRS(가상기준점서비스)시스템 구축 및 운용을 확대하고 있습니다.
RTK GPS 정확도
(1) 정지 측량으로 사용시
- 수평 위치 (X, Y) : 5mm + 1ppm (기선거리의 정확도임)
- 실시간 이동 측량시 : 10mm + 1ppm
(2) 실시간 이동 측량시
- 수평 위치 (X, Y) : 1 ~ 2cm
- 수직 위치 (H) : 2 ~ 4cm

단일 기준국 RTK
GPS 기준국의 역할을 하는 셋업 방식은 일반 GPS RTK 측량 시 베이스로 세우는 임시 기준국과 영구적으로 GPS 기준국의 역할을 수행 하도록 설치한 상시 기준국의 두 가지 방식으로 볼 수 있습니다. 두가지 셋업은 모두 GPS RTK 단일 기준국에 속하는 설치이며 이러한 단일 기준국은 기준국으로부터 로버의 거리가 멀어 질 수록 정확도, 신뢰도, 사용성이 저하되는 단점을 공통으로 가지고 있습니다. GPS 위성의 배치 상태, 전리층 영향, 주변 환경의 영향 등이 매우 좋은 조건과 그렇지 않은 조건의 경우 정확도, 신뢰도, 사용성에 있어 품질의 차이를 보인다. 이러한 오차로 인해 단일 기준국을 사용하는 GPS RTK의 경우 기준국으로부터 먼 장기선의 경우 정확도, 신뢰도 사용성에 있어 문제를 가지고 있습니다. (5~10Km 이하 단일 권역에서 운용)
Network Base RTK
한국에서는 RTK 방식의 거리 의존 오차를 보정하고, 광범위한 지역에서도 정밀한 위치를 측정할 수 있는 환경이 조성되어 있습니다. 통신망이 상당히 발달한 한국에서는 NTRIP 신호가 전국에서 잡히기 때문에 고정 기지국의 역할을 수행할 가상의 기준점을 만들고 인터넷을 통해 이를 보정할 수 있습니다.
이 방식은 네트워크 기반 RTK 혹은 VRS 측량이라고 부르며, 단일 기준국 RTK 방식이 기지국에 1대, 이동국에 1대 총 2대의 수신기를 필요로 했던 것에 비해, 국내에 24시간 가동 중인 국토지리정보원에서 운영하는 상시 관측소의 데이터를 사용함으로써 1대의 수신기와 블루투수 통신이 가능한 1대의 휴대전화로 GPS 측량이 가능합니다. 따라서, 정확도 향상과 더불어 비용에 대한 부담 또한 줄어드는 것이 장점입니다.
다시 말해, 네트워크 베이스 GPS RTK 기준국 솔루션은 앞에서 설명한 단일 기준국이 가지는 GPS RTK 솔루션의 한계를 극복하고자 제안되었습니다. 네트워크 베이스 GPS RTK 솔루션은 일정 간격으로 배치된 싱글 GPS 기준국을 이용하여 네트워크를 형성하고 이렇게 형성된 GPS 네트워크로부터 원시데이터를 실시간으로 수신하게 되고 이 것을 네트워크 알고리즘(VRS, FKP, MAC)을 통해 처리 후 사용자가 작업하는 지역에서 최적의 보정데이터를 생성하게 됩니다. 이렇게 생성된 보정 데이터는 다양한 무선 솔루션(RF 모뎀, CDMA, GSM)등을 통해 네트워크 내의 어느 지역에서든 실시간으로 보정 데이터를 제공할 수 있는 기술입니다.
NTRIP and VRS (가상기준점서비스)
NTRIP은 인터넷을 통해 RTCM 자료의 네트워크 전송을 위한 요약 하이퍼 텍스트 전송 프로토콜이며 HTTP 1.1에 근거를 둔 일반적인 통신 규격입니다. 국내에서도 휴대폰(CDMA)의 무선데이터통신 인터넷 기능을 이용하여 RTK-DGPS 기능이 있는 단독 GPS수신기에서 cm급의 정밀측위가 가능하도록 가상기준점서비스(VRS)를 운용하고 있습니다.
다수의 GNSS 기준국에 연결하여 기준국에서 관측한 데이터를 실시간으로 수신하기 위해 관측소명과 데이터 포맷으로 구성된 마운트포인트를 설정합니다. RTCM은 이러한 GNSS 관측소의 실시간 데이터에 대한 기본 데이터 포맷입니다.
● Network Transport of RTCM via Internet Protocol
• NTRIP은 공급자가 GNSS 데이터 흐름을 선택할 수 있도록 하고 사용자 인증 기능을 제공함
• GNSS 데이터를 전달하기 위한 프로토콜
• HTTP기반
• 어떤 종류의 GNSS 데이터도 분배
• 사용자/암호 인증 가능하게 함
• 모든 데이터 흐름에 1개의 TCP/IP 포트
• HTTP 포트 2101은 방화벽과 프록시 서버 지원
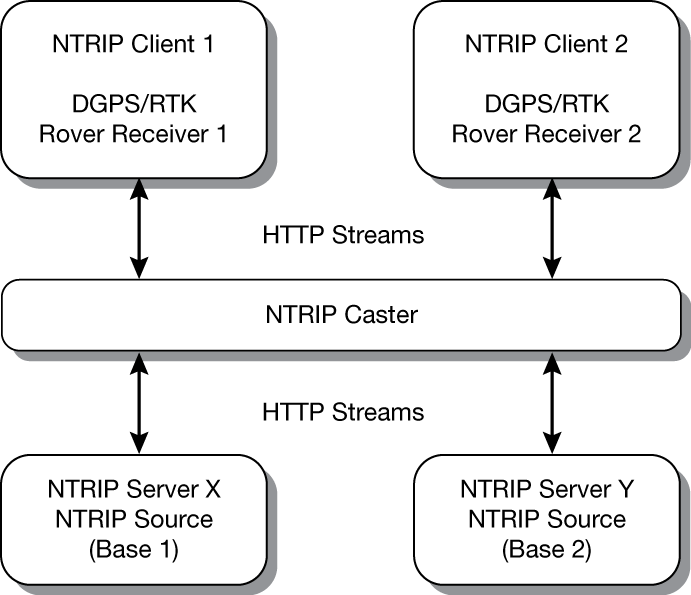
● NTRIP의 작동원리
• NTRIP 서버(Server) : HTTP 서버로 NTRIP 소스 데이터를 NTRIP 캐스터에 보내는 데 사용
• NTRIP 캐스터(Caster) : HTTP 서버로 소스 테이블 제공
• NTRIP 클라이언트(Client) : HTTP 클라이언트로 NTRIP 캐스터로부터 데이터를 받음

PPP-RTK
PPP(precise point positioning, 정밀단독측위) 측위방식과 RTK 측위방식을 결합한 PPP-RTK 측위 기술은 기존의 네트워크 RTK에 비하여 시스템 구축비용이 저렴하고 사용자 수의 제한 없이 1~2cm의 정확도를 확보할 수 있는 측량기술입니다.
PPP-RTK 측위기술은 중앙 제어국에서 기준국 네트워크의 관측 자료를 이용하여 GNSS 측위관련 다양한 오차 성분(전리층∙대류권 오차, 위성시계∙궤도 오차 등)을 계산한 후 사용자에게 보정정보를 제공함으로써 RTK 기준국을 별도로 설치할 필요 없이 정밀하게 위치를 결정할 수 있는 새로운 측위기술을 말합니다. 오차소거와 관련하여 기준국 원시자료를 수신하여 이중차분을 통해 오차를 소거하는 RTK 방식과 달리 PPP-RTK 방식은 중앙제어국에서 기준국 네트워크 원시자료를 활용하여 위성관련 오차, 이온층 및 대류권 오차를 산출하여 사용자에게 제공함으로 사용자는 단독으로 정밀한 위치결정을 할 수 있게 되었습니다.
현재는 PPP-RTK 측위 작업에서 필요로 전체 오차정보들 중 일부분에 대해서만 표준화가 되었습니다. 제공되는 오차정보의 종류가 적은 경우 PPP-RTK 측위보다 정확도와 성능이 낮은 DF-RT-PPP / SF-RT-PPP측위를 수행할 수 있습니다.
2007년 중반까지만 해도 PPP 해석은 대부분 GPS 위성만으로 수행되었지만 오늘날 다양한 GNSS 위성들의 사용으로 조합에 의한 PPP 해석 연구가 활발히 진행되고 있습니다.
최근에는 전 지구 GNSS 상시관측망을 운영하는 해석센터에서 계산한 보정정보를 NTRIP(networked transport of RTCM via internet protocol) 방식으로 전송하여 실시간 정밀절대측위의 정확도 향상을 위한 연구와 RTKLib 등과 같은 운용 프로그램의 연구가 활발히 진행되고 있습니다. 또한, PPP-RTK 측위기술의 대표적인 서비스인 IGS(international GNSS service)에서는 RTS(real-time service)를 위하여 전 세계 GNSS 상시관측망 자료인 위성기준점과 분석센터를 종합 해석하여 정밀 위성궤도력, 위성시계의 보정값 및 전리층 보정모델 등의 품질 향상과 산출 주기 단축 등 지속적인 서비스를 제공하고 지구물리 모니터링, 재해 감지∙경고 및 일기예보 등 다양한 분야에서 활용되고 있습니다.

RTCM (참고) - GPS 보정신호 전송 데이터 포맷
해양 서비스를 위한 무선 통신 기술 위원회(RTCM : Radio Technical Commission for Maritime Services)는 인터넷 프로토콜을 통한 RTCM의 전송(NTRIP : Networked Transport of RTCM via Internet Protocol )을 위한 표준 개정(version 2.0)을 완료했습니다.
그 중 RTCM의 Special Committee 104 (SC104)가 정의한 새로운 표준인 RTCM Standard 10410.1은 모바일 사용자를 포함하는 모든 인터넷 사용자에게 GNSS 데이터와 차분보정 데이터를 스트리밍(streaming)으로 전송하는 프로토콜을 정의하고 있습니다.
일반적으로 차분보정은 모바일 수신기의 실시간 위치 정확도의 개선을 위해서 자신의 위치를 정확히 알고 있는 기준국으로부터 무선으로 제공되어왔습니다.
The NTRIP project 는 2004년 지도제작과 측지학을 위해 독일연방청(German Federal Agency)에 의해 시작되었고 RTCM SC-104는 2004년에 NTRIP의 첫 번째 버전을 발표했습니다.
NTRIP은 서버에 접속된 PC, laptop, PDA, 전용 수신기를 이용하는 모든 이동형 및 고정형 사용자에게 GNSS 데이터를 인터넷을 통해 전송하기위해 설계되었으며, GSM, GPRS, EDGE, UMTS 등과 같은 무선 인터넷 접속망에도 적용가능합니다.
공개 프로토콜로서,NTRIP은 HTTP를 기반으로 하고 있으며 TCP/IP를 사용하는 모든 무선인터넷 망에서의 스트리밍 전송이 가능하도록 지원하고 있어서 GNSS의 종류에 상관없이 데이터 전송이 가능합니다.
NTRIP는 이번에 수정된 Internet radio broadcasting software를 사용할 때 100개의데이터 흐름(stream)을 동시에 전송할 수 있으며 1000명이 넘는 사용자에게 서비스할 수 있습니다.
NTRIP를 통한 보정 정보를 지원하는 항법 애플리케이션들은 현재 전세계에 수백종의 서비스가 있으며 특히 유럽에 많이 사용되고 있습니다.
RTCM Version 3 Transport Layer
| Field | Preamble | Reserved | Msg Length | Data (Variable) | CRC |
| Bits | 8 | 6 | 10 | 0 ~ 1024 bytes | 24 |
| Description | 11010011 | Not defined - set to 000000 | Message length in bytes | the messages defined in presentation layer | QualComm definition CRC-24Q Probability of undetected errors < 2 -24 for channel bit error probabilities < 0.5 |
참조 사이트
- RTK방식 CDGPS 및 VRS(가상기준점서비스)
- 서울특별시 네트워크 RTK시스템 - GNSS 현황
- GNSS 데이터 통합센터 - RTCM
- GNSS 데이터 통합센터 - NTRIP Protocol (version 1.0)
- rtcm-ntrip svn(guest/guest)
- RTKLIB: An Open Source Program Package for GNSS Positioning
- RTKEXPLORER
- RTKLIBEXPLORER GITHUB
- GPS 이론: GNSS, RTK 등
'Automated Vehicle > Localization' 카테고리의 다른 글
| UWB (Ultra Wideband) (0) | 2022.11.09 |
|---|---|
| AVM/DRM 시스템 (0) | 2022.07.12 |
| IMU 는 어디에 사용되는 물건일까요? (2) | 2022.04.21 |


